Gimbal Lock - 萬向鎖
環架鎖定(Gimbal lock),也稱為萬向鎖,是使用動態歐拉角表示三維物體的旋轉時會出現的問題。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
silverwind1982 發表在 痞客邦 留言(0) 人氣()
三維空間直角座標系的 x 軸,y 軸,與 z 軸必須相互垂直。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
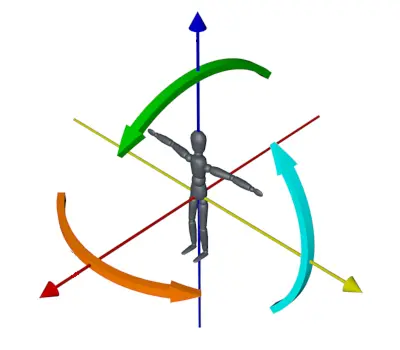
物體在三維空間的旋轉,可以有三個自由度(Degree of Freedom, Dof) - Roll, Pitch, Yaw,而表示物體在三維空間旋轉的方法有很多,例如:歐拉角、旋轉矩陣、旋轉向量、四元數...等,以下將簡單說明,並簡單說明歐拉旋轉定理。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
gradient 中文可以翻譯為斜率,如果要計算某個二元方程式的斜率,可以以 x 及 y 軸兩個方向來計算,方程式 f(x, y) 其 gradient 為 (f_x, f_y)。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
Laplacian Mask 的功能是用來作 Edge Detection,也就是把影像中,物體的邊界找出來,簡單介紹 Laplacian Mask 系數的由來。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
利用 Feature Matching 的方法來搜尋兩張影間之間相同 feature 的座標對應關係,利用該對應關係,透過 Homography 的方式,可以計算影像之間的透視轉換(Perspective Transformation)。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
兩張影像之間 feature matching 的進行,就是利用 feature descriptor 來作計算,計算的方式分為: Brute-Force Matcher 及 FLANN based Matcher。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
ORB (Oriented Fast and Roatated BRIEF) 如同其名,基本組成為原始的 FAST 的演算法,再配合經過修改、具有 rotation-invariant 的 BRIEF 演算法。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
BRIEF(Binary Robust Independent Elementary Features) 並沒有 feature detection 的功能,而是專注於 feature descriptor,BRIEF 的特點是 feature description 短,在 matching 時所需要的時間少,以下簡單說明 BRIEF 的演算法。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
在 feature detection 的部分,FAST (Features from Accelerated Segment Test) 可以說是目前速度最快的,以下簡單說明該演算法。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
SURF 其實就是加速版的 SIFT,簡單說明 SURF 在原本的 SIFT 架構下,作了哪些改進。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
簡單說明影像中 edge detection 的原理,以及 Sobel Operator 在 edge detection 的應用。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
SIFT 全名為 Scale-Invariant Feature Transform,具有 scale-invariant 的特性,在找到 feature 之後,可以產生相對的 feature descriptor,供不同的影像間作 feature matching。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
簡單說明 Shi-Tomasi Corner Dector
silverwind1982 發表在 痞客邦 留言(0) 人氣()
簡單描述 Harris Corner Detector 如果利用 Eigen Value 來判斷該區域為 flat, edge 或 corner。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
什麼是 feature? 為什麼 feature 很重要?
silverwind1982 發表在 痞客邦 留言(0) 人氣()
前提:對一個三維剛體模型,拍攝多張相片。
以這組相片中相關的投影點為依據,以求最佳解的方式,來求該模型的三維座標點、相片間相機的相對移動以及所使用相機的相機參數的方法,就稱為 Bundle Adjustment。
silverwind1982 發表在 痞客邦 留言(0) 人氣()
camera_calibration 為 OpenCV 所提供的範例程式,目地為對 相機(Camera) 作 校正(Calibration),以減少因為相機本身的因素而導致所拍攝的影像失真過大,而影響後續的影像處理。
該程式最後會產出該相機的相機矩陣(Camera Matrix,也就是內部參數 - Intrinsic Parameters) 以及 失真系數(Distortion Coefficients),可供後續作影像處理時參考使用。
silverwind1982 發表在 痞客邦 留言(9) 人氣()
Visual Odometry 是以相機所拍攝到的一連串影像為輸入,經影像處理後,還原相機在拍攝時的位移過程 - 包含:移動及旋轉,於是可以得知,相機在拍攝當下的移動方向、距離及旋轉方向,建立當時行走的軌跡;如果在拍攝影像時,即時作相同的影像處理,則可以得到即時的相機位移情況。
silverwind1982 發表在 痞客邦 留言(0) 人氣()

