Laplacian Mask 的功能是用來作 Edge Detection,也就是把影像中,物體的邊界找出來,簡單介紹 Laplacian Mask 系數的由來。
常見的 Laplacian Mask:
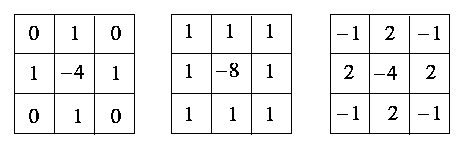
以下對第一個 Laplacian Mask 進行推導。
以影像來說,對影像微分,指的就是影像的像素值相減,所以對 f(x,y) 沿著 x 軸微分,可以得到其差分:
Δxf = f(x+1,y) - f(x,y)
再對這個微分後的結果,進行第二次微分:
Δx2f = f(x+2,y) - f(x+1,y) - [f(x+1,y) - f(x,y)]
= f(x+2,y) - 2f(x+1,y) + f(x,y)
令 x = x + 1,作參數取代,可得:
Δx2f = f(x+1,y) - 2f(x,y) + f(x-1,y)
同理,沿著 y 軸,經過二次微分後,可得:
Δy2f = f(x,y+1) - 2f(x,y) + f(x,y-1)
合併兩個軸的微分效應,可以得到 Laplacian operator 如下:
Δ2f = Δx2f + Δy2f
= f(x+1,y) - 2f(x,y) + f(x-1,y) + f(x,y+1) - 2f(x,y) + f(x,y-1)
= f(x,y+1) + f(x+1,y) + f(x,y-1) + f(x-1,y) - 4f(x,y)
而 Laplacian operator 就是用來構成 Laplacian Mask。
要作二次微分的原因,以數學上來說,是因為在第一次微分後,在物體邊緣處會有波峰產生,此時需要設定門檻值,如果該波峰超過門檻值,則判斷為邊緣,但是如果再經過一次微分,則微分後的波形會有通過零點(Zero Crossing) 的現象,更有利於判斷物體邊緣。
利用 Laplacian Mask 來判斷 f(x,y) 是否為邊緣的方式為:
如果滿足 Δ2f(x,y) 和 Δ2f(x+1,y) 的值呈現為一個正數一個負數,且之間的差值超過門檻值 T,則可以判斷 (x,y) 為 x 軸方向的物體邊緣。
如果滿足 Δ2f(x,y) 和 Δ2f(x,y+1) 的值呈現為一個正數一個負數,且之間的差值超過門檻值 T,則可以判斷 (x,y) 為 y 軸方向的物體邊緣。
Reference
影像處理與電腦視覺導論 - 鍾國亮
文字內容 或 影像內容 部份參考、引用自網路,如有侵權,請告知,謝謝。
全站熱搜

 留言列表
留言列表
