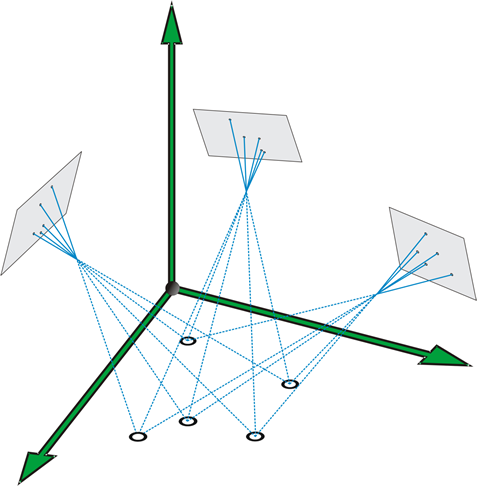
前提:對一個三維剛體模型,拍攝多張相片。
以這組相片中相關的投影點為依據,以求最佳解的方式,來求該模型的三維座標點、相片間相機的相對移動以及所使用相機的相機參數的方法,就稱為 Bundle Adjustment。
Bundle Adjustment 幾乎是所有以特徵點來作 3D 模型重建演算法的最後一個步驟,它等同於是對 3D 模型及 相機位置、相機矩陣、形變參數 求最佳解。
該名稱的由來為每個3D 特徵點所發出的光束,會在相機的焦點聚集,而這些光束可以根據 3D 模型及相機相關的參數作調整。
Bundle Adjustment 可以簡單形容為如何取得 reprojection error 的最小值, 也就是該模型的 3D 位置建立完成後,與所有影像的 reprojection error 為最小。
reprojection error 是指特徵點在 所拍攝的影像 與 所預測影像 之間的距離取平方。
Reference
Bundle adjustment - wiki
Bundle adjustment
文字內容 或 影像內容 部份參考、引用自網路,如有侵權,請告知,謝謝。
全站熱搜

 留言列表
留言列表
